3部構成の③です。
制御周期の影響を変更確認するためのシミュレーションをしました。
下記パラメータでは制御周期70Hz前後が発散と持続振動の境目でしたが、この理由について確認してみます。
| $ K_E $ | 1 [V/rad/s] |
| $ \tau_m $ | 1 [sec] |
| $ K_p $ | 112 [V/rad/s] |
| $ K_i $ | 3947 [V/rad] |
(連続系であれば閉ループ伝達関数 $ \frac{2 \omega \zeta s + \omega ^2}{s^2 +2 \omega \zeta s + \omega ^2} $に対して $ \omega = 10[Hz] $, $ \zeta = 0.9 $となる条件)
デジタル制御


答えからいうと、デジタル制御のお勉強: デジタル制御:最初の最初②では、
離散系を連続系に近似して制御系の評価をしようとしましたが、
サンプリング時間が長くなってくると(周期が下がると)、
離散系の特性が無視できなくなってきます。
今回は、逆に、連続系を離散系にサンプリングして制御系の評価をします。
まず、プラントであるDCモーターを離散表現するためにサンプリングについて考えます。
理想的な「サンプリング(A/D変換)」は入力に対し、くし型関数との掛け算で表されます。
入力を$ x(t) $ [連続値]とすると、くし型関数 $ \delta _T (t) $を使って、出力値$ x^*(t) $が $ x^*(t) = x(t) \cdot \delta_T(t) $と表されます。
関数の積に対するラプラス変換の関係は、
\[
\mathcal{L}[f(t) \cdot g(t)] = \frac{1}{2 \pi i} \lim_{T \to \infty}\int_{c - iT}^{c+iT}F(\sigma)G(s-\sigma) d\sigma
\]ですから、$ x(t) $のラプラス変換が $ X(s) $で、くし関数のラプラス変換が $ \mathcal{L}[\delta_T(t)]=\frac{1}{1-e^{-Ts}} $から
\[
X^*(s) = \frac{1}{2 \pi i} \lim_{T \to \infty}\int_{c - iT}^{c+iT}X(\sigma)\frac{1}{1-e^{-T(s-\sigma)}} d\sigma
\]となり、これがスター変換になります。これが離散系のラプラス変換にあたるZ変換につながるのですが
Yasunari SHIMADA先生のサイトがここを解説しています。
⇒ http://ysserve.wakasato.jp/Lecture/ControlMecha3/node5.html#SECTION00322300000000000000
また、D/A変換はデジタル制御:最初の最初①の通り0次ホールド(ZOH)で表現できます。
これらを合わせて制御系の離散系を求めるには、DCモータのZ変換(離散表現)を求める必要があり、
サンプリング周期 $ T_c $[sec]を使って ( $z = e^{s T_c} $)
\[\begin{align*}
\mathcal{Z}[ZOH(s) \cdot \frac{1/K_E}{s\tau_m+1}]&=(1-z^{-1})\mathcal{Z}[\frac{1}{s}\frac{1/K_E}{s\tau_m+1}] \\
&=\frac{1}{K_E}\frac{(1-e^{-\frac{T_c}{\tau_m}})z^{-1}}{1-e^{-\frac{T_c}{\tau_m}}z^{-1}}
\end{align*}
\]で求められます。
(幸い1979年のC. P. NEUMAN氏によるDigital Transfer Functions for Microcomputer Controlがオープンアクセスになっているので、こちらを参照すればデジタル制御で使うプラントの離散化には困らないでしょう)
この結果を用いて、離散系の一巡伝達関数を求めると
\[
G(z) \equiv (K_p + K_i T_c \frac{1}{1-z^{-1}})(\frac{1}{K_E}\frac{(1-e^{-\frac{T_c}{\tau_m}})z^{-1}}{1-e^{-\frac{T_c}{\tau_m}}z^{-1}})
\]
よって、この離散系の特性方程式は、
\[
1+G(z) = 0
\]となり、特性根を $ \gamma_1 \cdots \gamma_n $とすると、制御系の閉ループ伝達関数は定数$ C_1 \cdots C_n $を用いて
\[
\frac{G(z)}{1+G(z)} = \frac{C_1}{z-\gamma_1}+\cdots+\frac{C_n}{z-\gamma_n}
\]と表現できます。
したがって、
全ての極に対して$ | \gamma | < 1 $であるとき、系は収束
どれか一つでも1に等しくなると、振動系
1より大きくなると発散してしまいます。
先にシミュレーションした条件では70Hz前後が、この極が1より大きくなる閾値だったということです。
確かめてみましょう。
\[
1+G(z) = 0 \leftrightarrow z^2+((1-e^{-\frac{T_c}{\tau_m}})(\frac{K_p}{K_E}+\frac{K_i T_c}{K_E})-(e^{-\frac{T_c}{\tau_m}}+1))z+(-(1-e^{-\frac{T_c}{\tau_m}})\frac{K_p}{K_E}+e^{-\frac{T_c}{\tau_m}})=0
\]
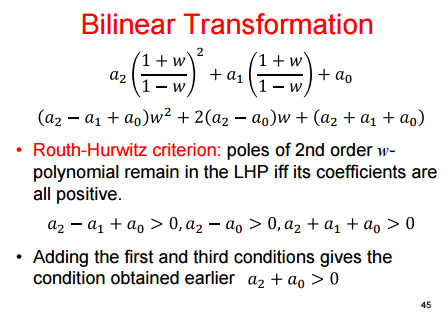
この特性方程式に不安定根が含まれるかどうかは$ z = \frac{1+w}{1-w} $という変換をしたうえで、
Routh Hurwitzの判別法が使えます。
2次のときは後述資料の通り下記の不等式を満たすことが条件です。
- $ 2(1+e^{-\frac{T_c}{\tau_m}})-(1-e^{-\frac{T_c}{\tau_m}})(2\frac{K_p}{K_E}+\frac{K_i T_c}{K_E}) > 0$
- $ (1-e^{-\frac{T_c}{\tau_m}})(\frac{K_p}{K_E}+1) > 0$
- $ 2+(1-e^{-\frac{T_c}{\tau_m}})\frac{K_i T_c}{K_E} > 0$
- $ 1+e^{-\frac{T_c}{\tau_m}}-(1-e^{-\frac{T_c}{\tau_m}})\frac{K_p}{K_E}>0$
 |
| http://wolfweb.unr.edu/~fadali/ee472/Stability.pdf |
第2式、第3式は $ K_p, K_i, T_c > 0 $から恒等的に成立します。
第1式、第4式については前記のパラメータを使って、$ 2(1+e^{-T_c})-(1-e^{-T_c})(224+3947 T_c) > 0$および$ 1+e^{-T_c}-(1-e^{-T_c})112>0$から$ 0 < T_c < 0.0142696 $が求まります。
(数値解: Wolfram Alpha)
使用したパラメータ(再掲)
| $ K_E $ | 1 [V/rad/s] |
| $ \tau_m $ | 1 [sec] |
| $ K_p $ | 112 [V/rad/s] |
| $ K_i $ | 3947 [V/rad] |
制御周期 0.0142696 secのとき、制御周波数は70.079..[Hz]ですから、
持続振動と発散(不安定)の境界が約70Hzにあることが確認できました。
No comments:
Post a Comment